・当研究室では,マイクロナノスケールの微細加工技術(マイクロマシン・MEMS/NEMS)を基盤技術として,ハイドロゲルなどの高分子材料,DNAやモータタンパク質に代表される生体材料など様々なスケールの素材を統合する物作りの構築法や,それにより創り出される新たなシステムの研究を行っています.
・特に,従来の機械・電子・情報システムでは達成することのできなかった,生命の持つ生命の持つ優れた機能(知性,運動能力,代謝など)を工学的に応用するために,生命の機構やシステムを模倣したマイクロロボット,生体材料を用いたバイオハイブリッドシステム,ソフトマテリアルの新規加工技術の開発に取り組んでおります.以上の研究を通じて,”生命”と”機械”,それぞれの利点を活かした革新的なバイオハイブリッドシステムの創造および新規学術領域の開拓を目指しております.
・研究キーワード:マイクロロボット,マイクロ流体デバイス,生体規範工学,3Dプリンティング,DNAナノテクノロジー
生体規範型マイクロロボティクス
工学技術の進歩に伴い,人間は様々な機械・電子・情報システムを作り上げてきました.一方で,自然界,特に生物に見られる構造や機能の中には人工的なシステムを凌ぐ性能を持つものも少なくありません.当研究室では,生物の運動および運動制御の力学的メカニズムから学び,ハイドロゲルなどの機能性材料を用いて機能を模倣することで,生命の構造・機構・機能を工学的に再現した生物規範型ロボティクスの実現を目指しております.
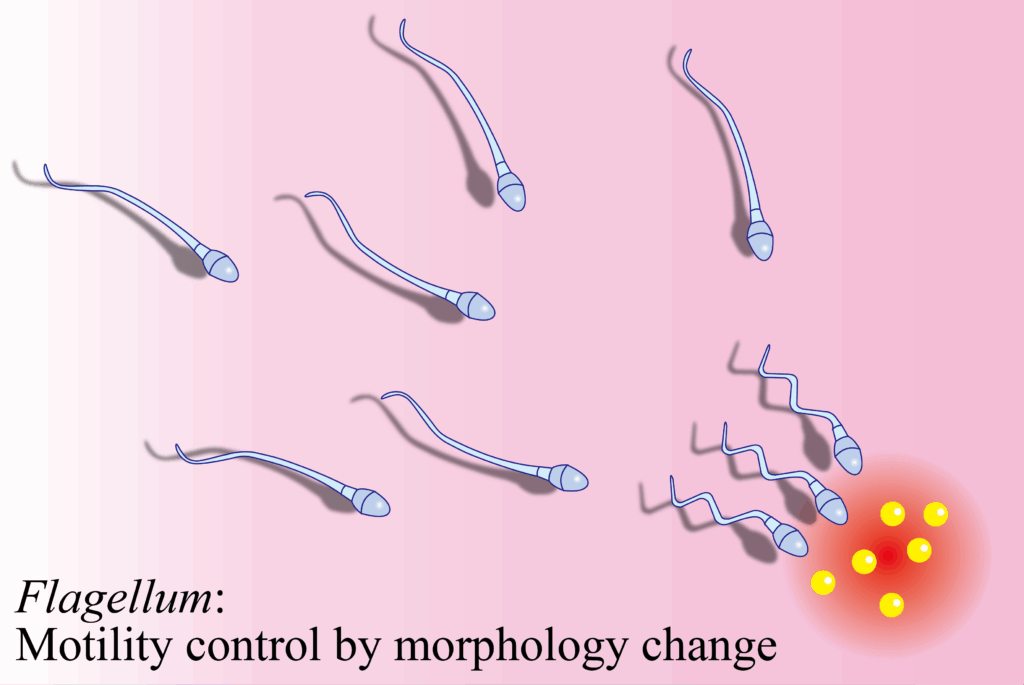
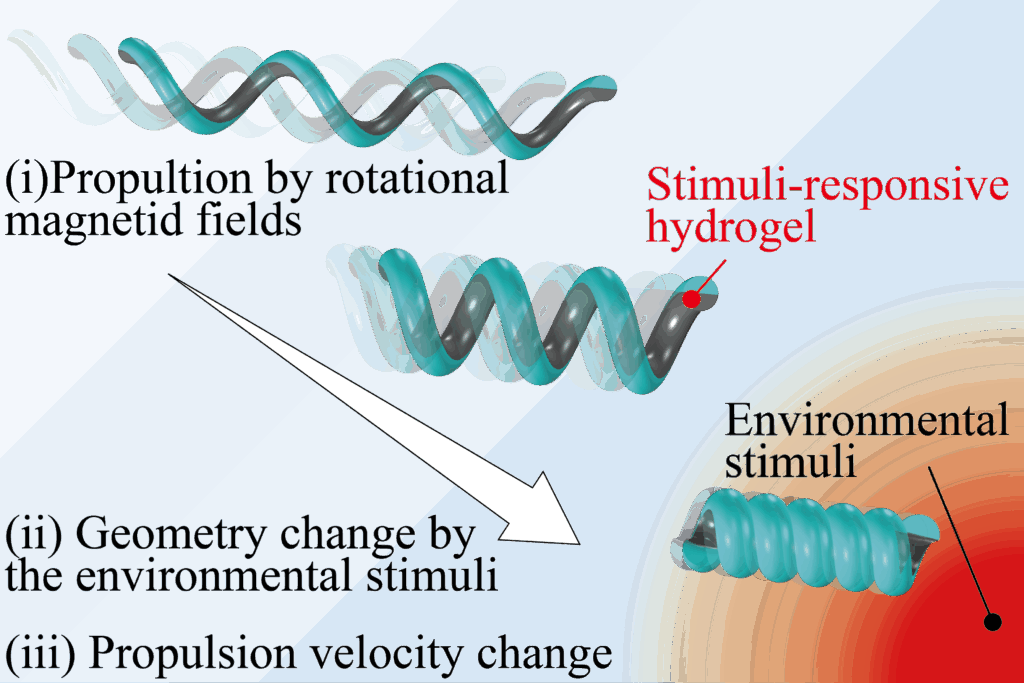
・Soft Spiral-Shaped Microswimmers for Autonomous Swimming Control
In nature, most microorganisms have motility, which is essential for their survival or reproduction. To move, some microorganisms have evolved soft spiral-shaped flagella, which rotate through specialized motors. Many of these microorganisms can change the morphology of their spiral-shaped flagella to control their motility. Herein, by mimicking these flagella, spiral-shaped microswimmers are developed for various applications, such as target drug delivery, micro-object transport, and micro-fluid manipulation. In previous studies, numerous fabrication methods of spiral-shaped microswimmers are developed. However, the swimming direction and velocity are controlled only by external systems, such as magnetic fields, because the spiral body is not able to deform. Therefore, this soft spiral-shaped microswimmer for autonomous swimming control by detecting surrounding stimuli is proposed. The velocity of microswimmer largely depends on the geometry of the microswimmer’s body. Through usage of a stimuli-responsive hydrogel in the microswimmer, the geometry autonomously changes in response to the surrounding stimuli. Using finite-element simulation, it is revealed that the pattern angle is an important parameter for acceleration/deceleration of the microswimmer. The dimensionless velocity of the fabricated bilayered spiral swimmer changes by deforming the geometry in response to the surrounding thermal stimuli.
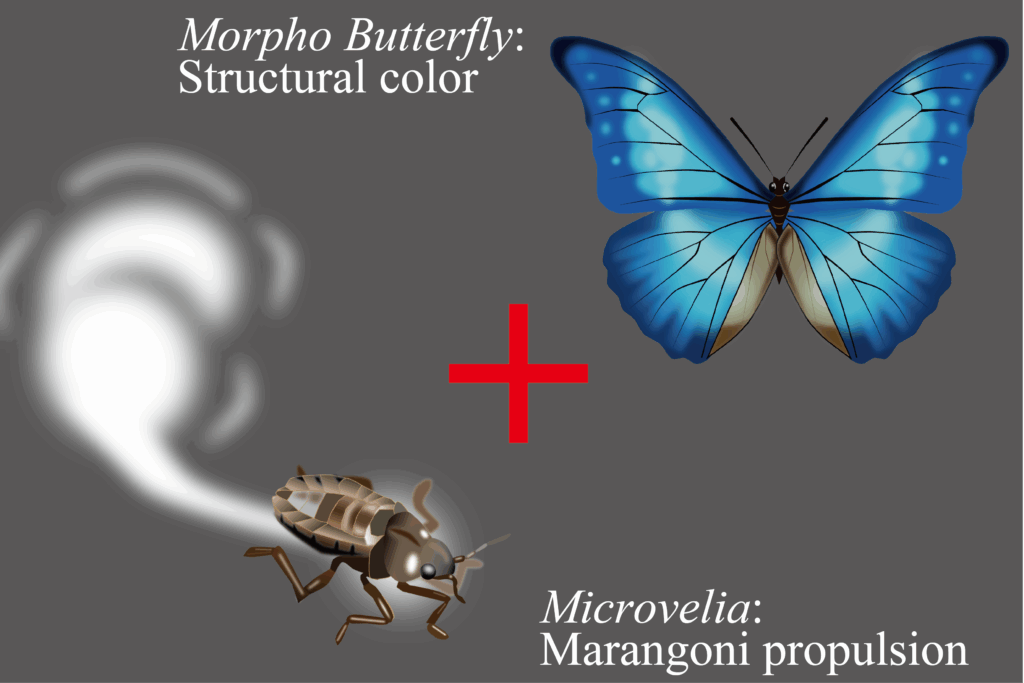
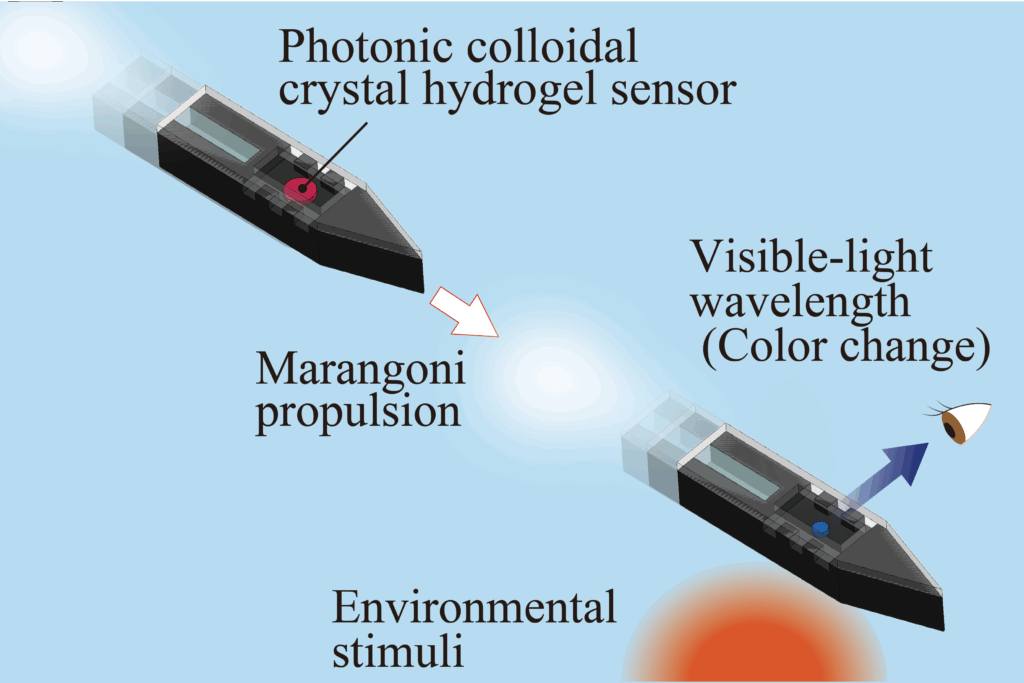
・Marangoni-Propulsion Micro-Robots
In nature, some insects can rapidly propel by using the Marangoni effect without employing the oscillatory movements of legs. Inspired by nature’s Marangoni-propulsion principles, various Marangoni-propulsion untethered micro-robots are achieved to propel with small energy storage. For practical use of Marangoni-propulsion micro-robots, it is required to have the intelligence to detect the external environment. However, previous Marangoni-propulsion micro-robots integrated with wireless micro-scale sensors that can sense the external environment and transmit the obtained information are not achieved. Herein, Marangoni propulsion micro-robots integrated with a wireless photonic gel sensor for exploring the aquatic environment and transmitting the environmental information are proposed. The proposed micro-robots can propel at the water–air interface by the Marangoni effect. The integrated photonic gel sensor can sense the external stimuli and transmit the information by the color change. In this research, the responsivity of the micro-robots is evaluated by the propulsion velocity and the response time of the photonic gel. It is shown that the propulsion velocity is changed by the outlet area. The response time decreased as the diameter of the photonic gel decreased. Finally, it is demonstrated that the photonic gel sensor can dynamically sense the external stimuli while the micro-robots propel.
バイオハイブリッドシステム
DNA,モータタンパク質,生体組織などの生体材料を用いることで,分子反応を積極的に利用した新しい機械・電子・情報システムの研究が進んでいます.当研究室では生体材料のマイクロ加工技術を開発を通じて,生体材料由来の機能と機械システムを融合したバイオハイブリッドシステムの構築を目指しています.
・Macroscale Collagen-Actomyosin Hybrid Actuator Built from Bioderived Materials
Biological muscles mainly consist of motor proteins that play essential roles and have a hierarchical structure covered with collagen that can transmit the tension to bones via tendons. The artificial reconstruction of motor proteins is highly expected from the viewpoint of engineering and biology. Although artificial muscles have been developed via synthetic and biological molecular motors, there is a considerable gap between the components of artificial and biological muscles, resulting in a significant obstacle to further scale-up and force transfer through macroscale structures. To overcome these obstacles via bioderived biomolecules, this study proposes a collagen-actomyosin hybrid soft actuator inspired by the structure of biological muscles. Collagen gel entrapping actomyosin can play roles in maintaining the actuator’s shape and transmitting the tensile force. The generated forces reach the micro-newton range, enabling the actuation of millimeter-scale mechanical components. These properties may be helpful for the fabrication of soft robotic systems with advanced functionalities.
・DNA aptamer-linked hydrogel biochemical sensor
This paper describes repeatable detection of Ag+ ions using a DNA aptamer-linked hydrogel biochemical sensor integrated with a microfluidic heating system. Biochemical sensors that respond to chemical compounds and produce detectable signals have a critical role in many aspects of modern society. In particular, the repeatable measurement of environmental information such as toxic substances including Ag+ ions could be expected to improve the environment. The DNA aptamer is an attractive candidate because of the stability and the selectivity of binding to chemicals. However, previous DNA aptamer biochemical sensors could not measure repeatedly because those sensors did not have initializing functions. To overcome this challenge, we proposed a DNA aptamer-linked hydrogel biochemical sensor integrated with the microfluidic heating system enabling repeatable detection of Ag+ ions. The binding Ag+ ions are dissociated by heating and flushing through the integrated microfluidic heating device. The DNA aptamer-linked hydrogel had the capability to detect a wide range of Ag+ ion concentrations (10−5–10 mM) including a toxic range for various aquatic organisms. Finally, we demonstrated the repeatable detection of the Ag+ ions. These results indicated that our proposed biochemical sensor is expected to use for long-term monitoring with high stability in ambient temperature and low power consumption.
デジタルファブリケーション技術
3Dプリンティングに代表されるデジタルファブリケーション技術は,誰でも簡単に短時間で創造物を製作する技術として様々な分野での活躍が多いに期待されています.近年,3Dプリンティング技術の発展に伴い,形状だけではなくセンサやアクチュエータといった機能まで造形する技術が実現されています.当研究室では,紙とシリコーンゴムの3Dプリンティング技術を組み合わせることで,誰でも簡便に設計可能なペーパーマイクロ流体ロボティクスの開発に取り組んでいます.また,紙の毛細管現象や印刷したマイクロ流体デバイスを利用することで,生命のように自律的に外部の環境とエネルギや物質のやり取りが可能なシステムの実現を目指します.
・Microfluidic paper-based analytical soft actuators (μPAC)
Soft actuators have developed over the last decade for diverse applications including industrial machines and biomedical devices. Integration of chemical sensors with soft actuators would be beneficial in analyzing chemical and environmental conditions, but there have been limited devices to achieve such sensing capabilities. In this work, we developed a thin-film soft actuator integrated with a paper-based chemical sensor, termed a microfluidic paper-based analytical soft actuator (μPAC). μPAC consists of (1) a silicone thin film with a 3D-printed pneumatic chamber and (2) a cellulose paper. This cellulose paper offers dual functions: the strain-limiting layer of a soft actuator and the substrate for the chemical sensor for a paper-based analytical device (μPAD). We characterized the design parameters of the actuators—namely, (1) thickness of silicone thin film, (2) chamber length, and (3) Young’s modulus of silicone thin film—to evaluate the actuation performance. These characterizations suggested that the cellulose paper served as a suitable self-straining layer of the actuator, making μPAC a chemical sensor that can actuate simultaneously. Highlighting the unique capability of μPAC, we demonstrated the local detection of pH on the curved target surface. Overall, this research demonstrated the rapid fabrication of actuating chemical sensors with a unique design by combining soft actuators and μPAD, enabling chemical sensing on various surface topologies by dynamically making conformal contact.